
Throughout the history, people encountered lots of wars which affected economical,industrial and technological development of countries. These terms are all related to each other. Developed countries obtained industrial and technological development faster. That resulted in designing different kinds of vehicles, machines and so on in order to be used in the war. Ships can be stated as a good example for the case. Ships used in the war could throw torpedoes, transport soldiers and such kind of attacking options. After these were happened,defense industry started to be developed. Mines were designed in order to damage ships and submerge them. Hence, a need emerge for ships, which cost lots of money to design and manufacture. This need was to detect mines underwater.
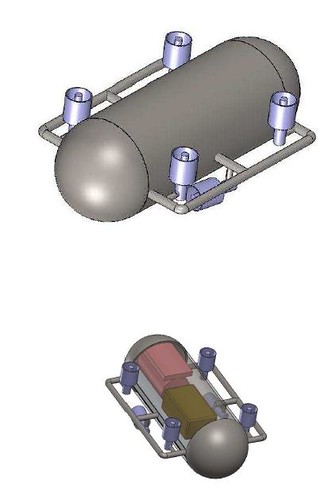
There are two system known which are used for detecting mine underwater. One is AUV (Autonomous Underwater Vehicle) and the other is ROV (Remotely Operated Vehicle). AUV systems are mostly used for detecting underwater. In these systems, sonar is used for detecting mines. Nowadays, people are trying to develop these systems by increasing working depth, detecting range, decreasing mass and dimensions and such kind of parameters. There might be no war from now on, but people are still trying to develop these systems because technological development can be expressed as a proof of power of a country whatever the subject is. The project report is below:
MİNE DEDECTION ROBOT DESIGN
-
Son Yazılar
- Fuel Types of Next Generation Commercial Vehicles
- Otomotiv OEM’de 6 Sigma ? Çok İyi Uygulayan Firmalarda Neden Aksaklıklar Var ? Yapılar Nasıl ? Transferler Ne? Tezatlar Nerede ?
- Otomotiv OEM’de Ar-Ge Yapılanmasını Nasıl İlerletiyorlar ? Biraz Detay Farkı Var..
- Otomotiv Sanayinde Binek Araç,Ağır Vasıta,Diğer Araç Tiplerinde Aynı Yönetici Tipi mi Kullanılmalı ?
- Amerikan Otomotiv Devleri (GM, Ford, Chrysler) Neden Zaman Zaman Zora Giriyor ?
Son Yorumlar
- Emergency Call Systems After eCall Equipped Vehicle Regulations için Avalanchemyz
- Emergency Call Systems After eCall Equipped Vehicle Regulations için Backlitsza
- Emergency Call Systems After eCall Equipped Vehicle Regulations için Cutteroyc
- Fuel Types of Next Generation Commercial Vehicles için HarryTutle
- 2012 Electric Vehicle Conference in USA için Gaylord
Arşivler
Son Yorumlar
- Emergency Call Systems After eCall Equipped Vehicle Regulations için Avalanchemyz
- Emergency Call Systems After eCall Equipped Vehicle Regulations için Backlitsza
- Emergency Call Systems After eCall Equipped Vehicle Regulations için Cutteroyc
- Fuel Types of Next Generation Commercial Vehicles için HarryTutle
- 2012 Electric Vehicle Conference in USA için Gaylord
- The First Electric Minibus In Turkey için Rocvrvyx
- The First Electric Minibus In Turkey için Alice Sophia Dow and Mario Roberto Torres
- The First Electric Minibus In Turkey için SEO
- The First Electric Minibus In Turkey için Magazine Covers
- The First Electric Minibus In Turkey için Event locations
Kategoriler
Mayıs 2026 P S Ç P C C P « Oca 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31