
The problem is that too much time is needed when weaving a hand made carpet by hand. To solve this problem, a full automated electromechanical system is designed and developed. At first, parts of the system is considered and designed each them seperately. Secondly, kinematic,dynamic and force analysis calculations are made by the planar four-bar linkage of the system. Next step is manufacturing and choosing the material of the system. Delrin and the microservo motors are the main material of the base part and linkages,after that drilling and milling the delrin, microservo motors are put in the mechanism.
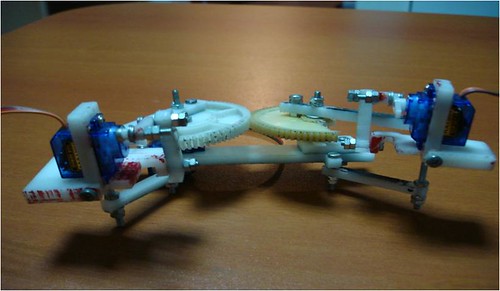
Furthermore, gears of the mechanism are chosen and the ground part of the system is drilled according to those gears. Finally, mechanism is tested and solved the minor problems which may be ocur in the connecting parts such as bolts. As a result, using this kind of a full automated electromechanical system increase the product speed and there is no need the too much employer force to weave a conventional carpet. The project is below:
Planar Knotting Mechanisms
-
Son Yazılar
- Fuel Types of Next Generation Commercial Vehicles
- Otomotiv OEM’de 6 Sigma ? Çok İyi Uygulayan Firmalarda Neden Aksaklıklar Var ? Yapılar Nasıl ? Transferler Ne? Tezatlar Nerede ?
- Otomotiv OEM’de Ar-Ge Yapılanmasını Nasıl İlerletiyorlar ? Biraz Detay Farkı Var..
- Otomotiv Sanayinde Binek Araç,Ağır Vasıta,Diğer Araç Tiplerinde Aynı Yönetici Tipi mi Kullanılmalı ?
- Amerikan Otomotiv Devleri (GM, Ford, Chrysler) Neden Zaman Zaman Zora Giriyor ?
Son Yorumlar
Arşivler
Son Yorumlar
- 2012 Electric Vehicle Conference in USA için Gaylord
- The First Electric Minibus In Turkey için Rocvrvyx
- The First Electric Minibus In Turkey için Alice Sophia Dow and Mario Roberto Torres
- The First Electric Minibus In Turkey için SEO
- The First Electric Minibus In Turkey için Magazine Covers
- The First Electric Minibus In Turkey için Event locations
- 2012 Electric Vehicle Conference in USA için barki turystyczne
- Photos için burak
Kategoriler
Aralık 2025 P S Ç P C C P « Oca 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31